Motion and Force Analysis Upper limb robotic exercise Dataset
Alexandros Lioulemes, Michail Theofanidis, Srujana Gattupalli, Vassilis Athitsos, Fillia Makedon
Heracleia Human-Centered Computing Laboratory
The University of Texas at Arlington
{alexandros.lioulemes@mavs.uta.edu}
Summary
We have selected appropriate upper limb exercises that the patient is able to perform using the robotic Barrett WAM Arm. The robotic dataset will simulate upper limb exercises with an elastic band. We use the force and torque (F/T) sensor attached in the end-effector of the robotic arm, due to its detail and exact force and torque sensing output at any instance of movement. The information obtained from the robotic arm validates the computer vision skeleton tracking data captured using a Kinect v2 and helps us build a Motion and Force Analysis Toolbox that can be used by occupational therapists and engineers who are developing upper limb exoskeleton arms and prosthetics. The advantage of this motion analysis toolbox is that provides a variety of upper limb exercises with different resistance and elastic band stiffness factors and can emulate the exact human joint link torques at each moment of the exercise. The selection of the gender and the weight/length volume enable a personalized force/torque extraction at each joint link. Finally, the incorporation of the human kinematic model using the robotic toolbox, in the torque analysis part, will enable the better understanding of the human range of motion.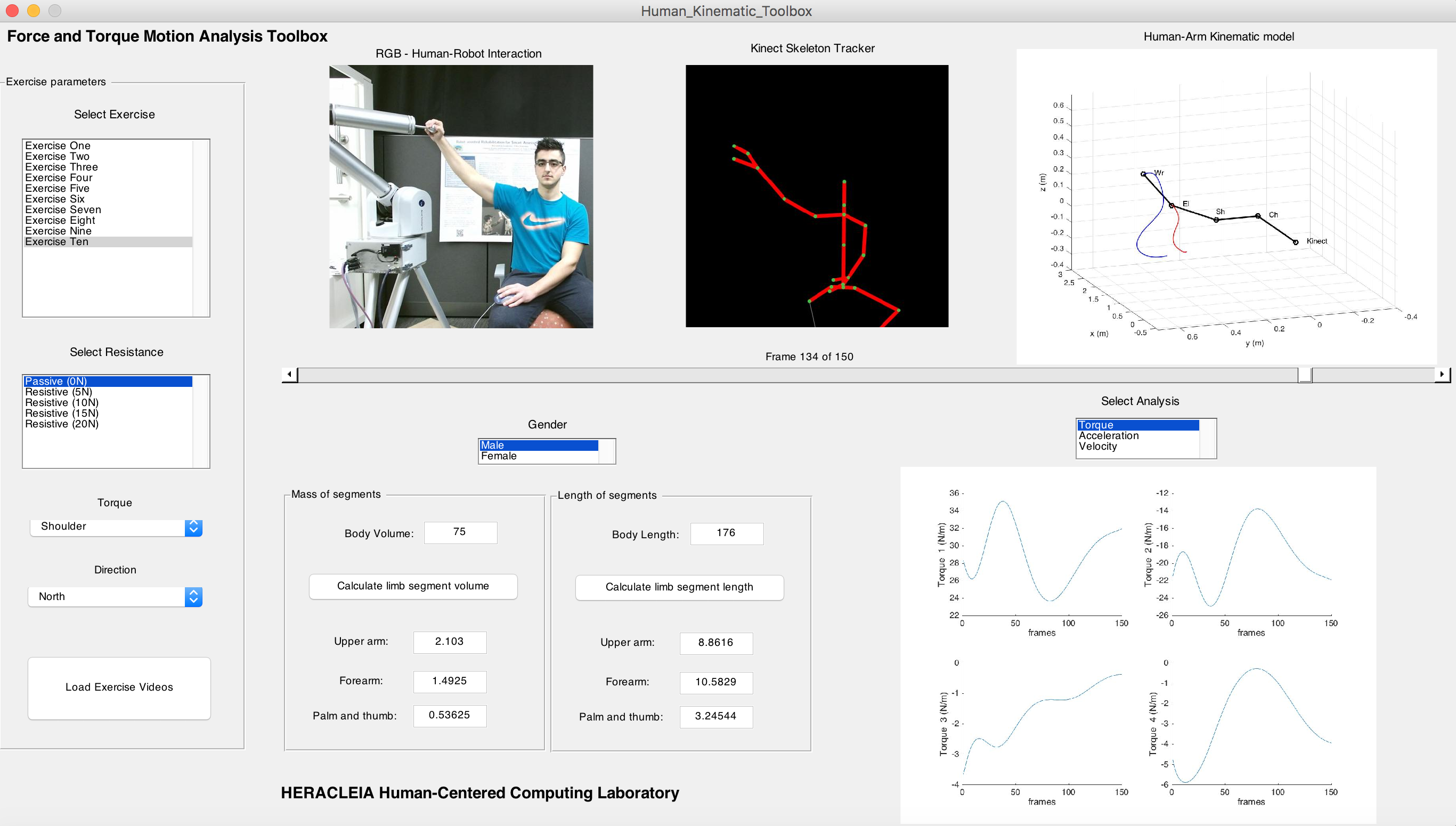
Data Description
The dataset contains upper limb videos, captured by the Kinect v2 camera, 3D positions/orientations of the Chest, Shoulder, Elbow and Wrist (SkeletonData3D.csv) and force components, taken from the robotic Barrett WAM Arm's (F/T) sensor (BarrettData3D.csv), while the user is exercising.
Download
Individual
test subject data can
be downloaded below.
| Exercise | Seconds | Frames | File Size (MB) |
| Bicep Curl | 5 | 150 | 50.8 |
| Front Lateral Raise | 5 | 150 | 50.6 |
| Shoulder Press | 5 | 150 | 50.8 |
| Chest Press | 5 | 150 | 49.6 |
| Triceps Extension | 5 | 150 | 58.4 |
| Seated Row | 5 | 150 | 47.9 |
| Dips | 5 | 150 | 48.6 |
| Front Arm Circles | 5 | 150 | 47.8 |
| Side Arm Circles | 5 | 150 | 49.7 |
| Side Arm Eight | 5 | 150 | 48.8 |